Марсианский вездеход или Скай Фай Ровер
Автономный футуристичный робот в стиле скай фай или киберпанк. Бронированное транспортное средство на эпичном фоне.
Автономный футуристичный робот в стиле скай фай или киберпанк. Бронированное транспортное средство на эпичном фоне.
История изучения Марса уходит далеко в прошлое. Еще несколько столетий, да чего говорить, несколько десятилетий назад люди считали, что Красная планета населена ни кем то там, а разумными существами, наподобие людей. Каким же было разочарование человечества, когда оно начало глубокое изучение Марса. Одно дело, если наблюдать за Марсом из объектива телескопа, а другое - отправить к нему и посадить на его поверхность космические аппараты, напичканные современной научной аппаратурой, которая может дать конкретный ответ.
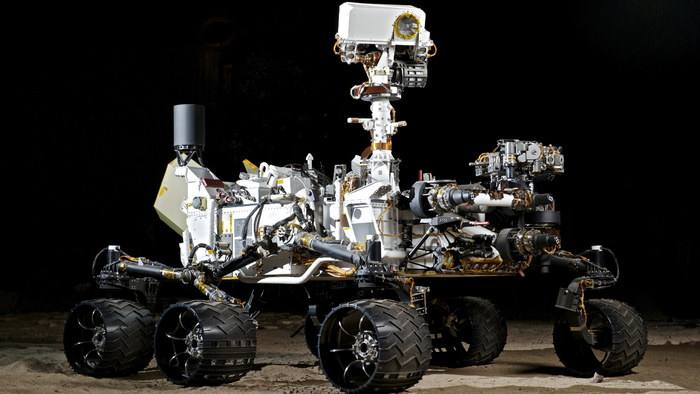
Марсоход Curiosity
В нашем случае, такими аппаратами выступают как космические зонды, которые изучают Марс, находясь на круговой орбите, так и аппараты, совершившие успешную посадку на поверхность Красной планеты. Нужно подметить, что подавляющее большинство аппаратов к Марсу было отправлено Соединенными Штатами Америки. Так сложилось, что американские научные круги сделали в свое время упор на изучение дальнего космоса. А именно, изучение планет Солнечной системы, в том числе и, интересующей нас, планеты Марс.
Советские Союз также предпринимал ряд попыток плотного изучения Марса, но неудачи не позволили хоть как-то закрепиться нашей стране на Красной планете, поэтому лидерство тут полностью удерживают США. Попытки Китая очень радуют, для науки важны любые запуски, но если сравнить их аппарат и американские, то пока что, все находится на совсем начальной стадии для Китая. Но если вспомнить, то и США, ведь, тоже когда-то начинали свой путь в изучении Марса.
Сегодня поговорим именно о планетоходах, которые покорили Марс, смогли на нем закрепиться и проработать достаточное количество времени, чтобы внести свой огромный и неоценимый вклад в развитии науки о космосе, планетах и звездах. Планетоходы еще называют марсоходами или роверами. Называйте как хотите, в принципе и так, и так будет верно. Ведь, главное не название космического аппарата, а его живучесть и начинка. Имеем ввиду то, чтобы марсоход мог выдерживать суровый марсианский климат, а установленная аппаратура - передавать подробные и четкие данные с поверхности Марса.
Оговоримся, что и тут, наша страна в лице Советского Союза - обошла американцев и отправила на поверхность Марса первый в мире марсоход. Произошло это в далеком 1971 году. Марсоход имел название ПрОП-М, что переводится как "Прибор оценки проходимости - Марс". 2 декабря 1971 года он сумел проработать на поверхности Красной планеты всего 14 секунд, после чего сигнал с ним был потерян навсегда. Конечно он был совсем небольшим и связь поддерживалась со станцией "Марс-2" через длинный кабель. Эти марсоходы имели вместо колес лыжи. Так было, потому что конкретных сведений о поверхности Марса еще не было.
Последующие пять марсоходов были отправлены на Марс Соединенными Штатами Америки. Больше, чем через 25 лет 4 июля 1997 года спускаемый аппарат Mars Pathfinder доставил на Марс первый американский марсоход "Соджорнер" (Sojourner). Он проработал на Красной планете 83 марсианских сола, что равняется 85 земным дням. На марсоходе были установлены три камеры и несколько спектрометров. 27 сентября 1997 года был потерян сигнал с аппаратом Mars Pathfinder, это не позволило поддерживать связь с Соджорнером. Местонахождение марсохода так и неизвестно по сей день. Всего этот марсоход преодолел около 100 метров до потери связи.
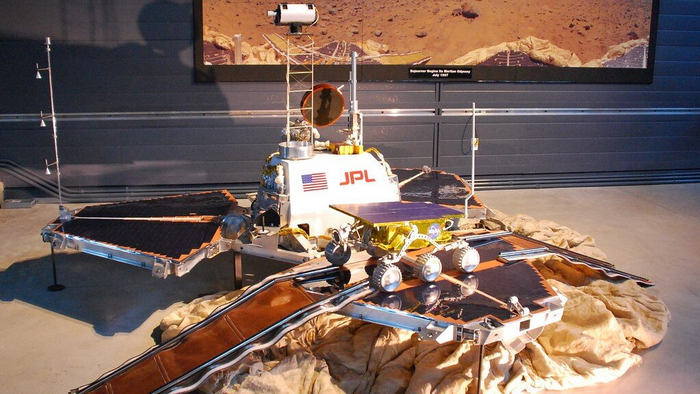
Спускаемый аппарат Mars Pathfinder

Марсоход Sojourner. Фото, сделанное камерой Mars Pathfinder
Следующими, вторым и третьим, стали марсоходы Spirit и Opportunity. Посадка обоих аппаратов произошла в январе 2004 года. Это были два мобильных однотипных марсохода, созданных космическим агентством НАСА в рамках проекта Mars Exploration Rover. Оба марсохода были рассчитаны на работу в 90 дней, но проработали очень долго. Spirit, в общей сложности, больше 6 лет, пока в 2009 году не застрял в песчаной дюне. Связь с ним прервалась в 2010 году. Opportunity стал рекордсменом и проработал на Марсе больше 14 лет - до 2018 года. Мощная пылевая буря засыпала солнечные батареи на марсоходе. Это привело к тому, что аппарат перешел в спящий режим и с тех пор связь с ним была потеряна.
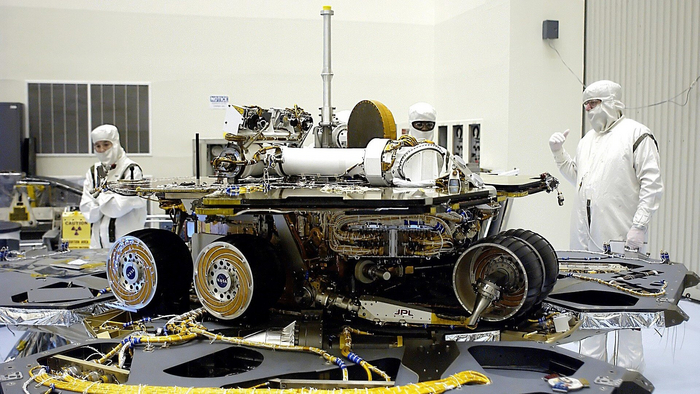
Оба этих марсохода, благодаря большому количеству различных камер и научной аппаратуре - позволили узнать о Марсе много новой, конечно же, ранее неизвестной для человечества информации. Но еще больший вклад в изучение Марса внес марсоход третьего поколения Curiosity. Нужно отметить, что он работает до сих пор. Запущен он был нобяре 2011 года, посадка состоялась 6 августа 2012 года. Питается марсоход благодаря радиоизотопному термоэлектрическому генератору (РИТЭГ). Это и позволяет быть ему независимым от солнечных батарей.
На нем установлены огромное количество различной научной аппаратуры и всевозможных датчиков, телевизионных камер и так далее по списку. Марсоход умеет двигаться на 360 градусов стоя на одном месте, а его колеса имеют каждая свои собственные электродвигатели. Сам марсоход длиной 3 метра, шириной 2,7 метров, массой около 900 кг. Марсоход на момент 10 августа 2021 прошел по поверхности Марса 26,06 км. Рекорд же за Opportunity, он прошел за 14 лет больше 45 км. Установленный на марсоходе манипулятор, длиной 2,1 метров имеет на своей турели пять научных приборов, которые добывают для ученых научную информацию.
Opportunity перед упаковкой его в спускаемый аппарат
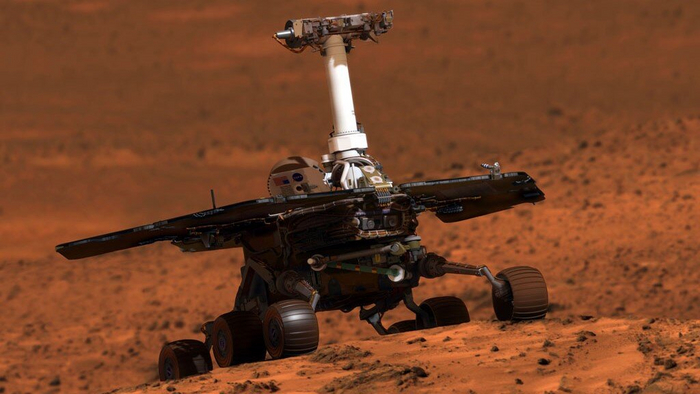
Spirit на Марсе в представлении художника

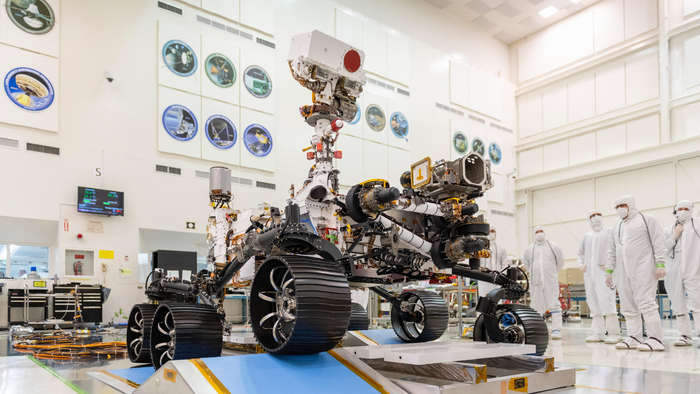
Curiosity, еще на Земле

Фото поверхности Марса, сделанное марсоходом Opportunity
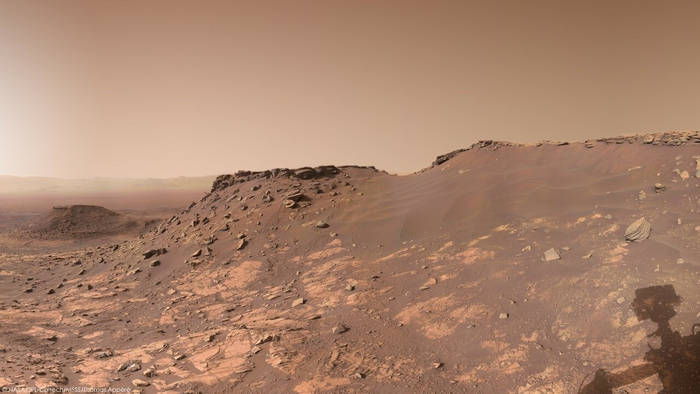
Фото поверхности Марса, сделанное марсоходом Curiosity
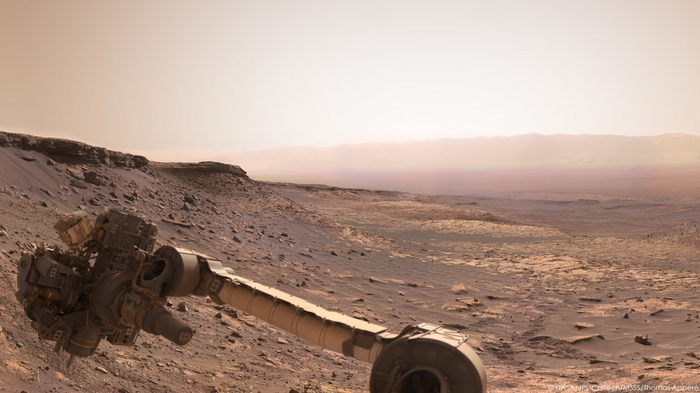
Фото поверхности Марса, сделанное марсоходом Curiosity
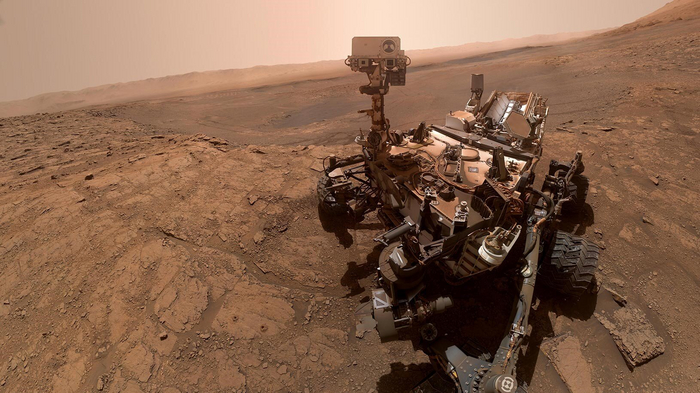
Селфи, сделанное марсоходом Curiosity
Ну и последний, на данный момент, американский марсоход Perseverance, который еще более совершен, чем свои предшественники. Создан в рамках миссии Mars 2020 Rover Mission. Посадка этого марсохода, состоявшаяся 18 февраля 2021 года, была снята с разных ракурсов, как с самого марсохода, так и с "Небесного крана", который доставил Perseverance на поверхность Марса и произвел его мягкую посадку, опустив его на нескольких тросах. Зрелище непередаваемое, которое нужно увидеть. Конечно же, как вы поняли, Perseverance полностью напичкан всевозможными датчиками, приборами, камерами. Есть на нем и манипулятор с турелью.
Внешне Perseverance походит на всё еще работающий на Марсе марсоход Curiosity. Энергию марсоход получает от РИТЭГ, а также установлены две литий-ионные перезаряжаемые батареи. С собой на Марс Perseverance привез первый в истории летательный аппарат - вертолет Ingenuity, на котором установлены камеры. Практическое применение Ingenuity доказало тот факт, что в дальнейшем есть шансы на использование на Марсе подобные аппараты, но в более сложном исполнении и с большим количеством научных приборов.
Еще одной огромной миссией этого марсохода является то, что он должен провести отбор, сбор и хранение проб камней и почвы с марсианской поверхности. Дело в том, что в будущей миссии на Марс отправится аппарат, который должен будет доставить на Землю все эти материалы для их непосредственного изучения на Земле.

Селфи марсохода Perseverance с вертолетом Ingenuity
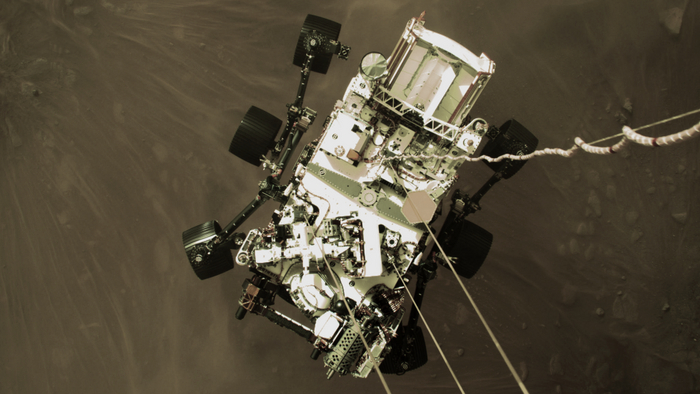
Фото марсохода Perseverance во время его спуска
Марсоход Perseverance

Фото поверхности Марса, сделанное марсоходом Perseverance
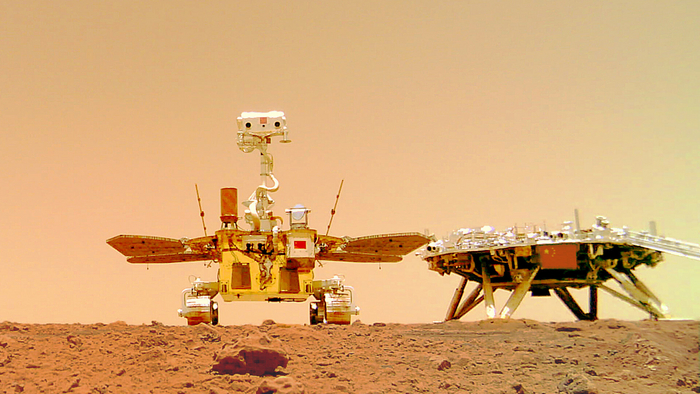
Селфи, сделанное китайским марсоходом Тяньвэнь-1
Будет неправильным упомянуть и первый китайский марсоход Тяньвэнь-1. Это шестиколесный марсоход, доставленный на Марс в рамках китайской миссии Mars Global Remote Sensing Orbiter and Small Rover. Вес марсохода составляет около 240 кг. Посадка аппарата произошла 14 мая 2021 года. Китайский марсоход напичкан различной научной аппаратурой и телекамерами. Это, конечно, не конкурент американским аналогам, но заметим, что у нашей страны нет и такого аппарата и это, на самом деле, наводит большую грусть на всю отечественную программу по изучению дальнего космоса. Тяньвэнь-1 продолжает работать и по сей день.
Основной целью всех этих планетоходов, конечно же, является поиск признаков жизни на Марсе. Не столь важно, была ли эта жизнь раньше или существует сейчас. Самоцель - убедиться в том, что жизнь существует не только на Земле, а есть еще и на других планетах. Подметим, что есть еще один марсоход, который должен отправиться на Марс в рамках проекта ExoMars 2022. Это совместный проект ЕКА (Европейского космического агентства и российской госкорпорации "Роскосмос". Цель у проекта та же, что и остальных - найти следы жизни на Марсе в его прошлом или же в настоящее время.
На сегодня, вы узнали обо всех планетоходах, которые сумели покорить Марс и добыть для людей ту частичку ценной информации, которая необходима для того. чтобы понять, одни ли мы в этом мире, или всё-таки, есть жизнь и на других космических телах.
Если Вам понравилась статья - поставьте лайк. Будем рады вашей подписке на нашу страницу в Пикабу и сообщество в ВК, а также сообщество в Пикабу "Все о космосе".

Робот-марсоход Андрея Сырвачева занял первое место во всероссийском конкурсе научно-технологических проектов «Большие вызовы» в направлении «Космические технологии». Вдохновленный историей исследований Марса, молодой изобретатель-робототехник решил создать собственного марсохода уже в школьные годы. В 11 классе он разработал уникальную концепцию робота, который мог бы исследовать поверхность Красной планеты. Однако, его талант и усилия были признаны не только в школьных стенах. Победа во всероссийском конкурсе подтвердила значимость его работы и привлекла внимание широкой общественности.
Среди множества планет Солнечной системы Марс особенно привлекает внимание ученых. Близость к Земле и возможность нахождения следов жизни и потенциальной колонизации в будущем делают его наиболее интересным объектом исследования.
Новые возможности для человечества во многих областях жизни, от транспорта до медицины, открывает именно развитие космических технологий и изучение космического пространства — одной из приоритетных задач в современном мире. Технологии, созданные для использования в космосе, находят все большее применение на Земле. Однако, несмотря на это, отмечается нехватка технических специалистов в ракетно-космической отрасли.
Новые идеи и предложения молодежи могут стать ключом к привлечению большего числа специалистов в аэрокосмические направления. Именно поэтому первокурсник электротехнического факультета ПНИПУ Андрей Сырвачев предложил наглядную популяризацию науки и космических технологий, чтобы привлечь внимание молодых людей и вдохновить их на исследования в этих областях науки и техники. Предлагаемые им методы популяризации могут включать проведение интерактивных лекций, организацию экскурсий в космические центры и лаборатории, а также создание специальных мероприятий и конкурсов для молодых ученых. Важно, чтобы эти мероприятия были доступными и интересными для широкой аудитории, чтобы молодежь могла не только узнать о новейших достижениях в космической отрасли, но и понять, как они могут внести свой вклад в исследование космоса.

Привлечение молодежи в аэрокосмические направления имеет огромный потенциал для дальнейшего развития космической отрасли. Это может не только увеличить численность специалистов в этой области, но и способствовать появлению новых идей и инноваций. Кроме того, это также поможет сохранить и передать опыт более опытным поколениям и создать сильную научно-техническую базу для будущих космических исследований. Поэтому необходимо активно поддерживать и развивать инициативы, направленные на популяризацию науки и космических технологий среди молодежи.
Создатель марсохода стремится не только показать детям и молодежи, что теоретические знания по физике, электронике и информатике могут быть применены на практике, но и проводит мастер-классы, на которых демонстрирует возможности своего робота. Марсоход был построен таким образом, чтобы он мог автономно двигаться при помощи веб-камеры, проводить фото- и видеосъемку, отбирать пробу грунта для исследований, измерять температуру и влажность воздуха, а также концентрацию газа, такого как метан. И все эти данные марсоход передавал на «Землю» для анализа и исследований. Таким образом, Андрей Сырвачев не только создал увлекательную модель марсохода, но и вовлекает молодое поколение в науку и технологии, показывая им, как применять теоретические знания на практике и вдохновляя их на собственные исследования и открытия.
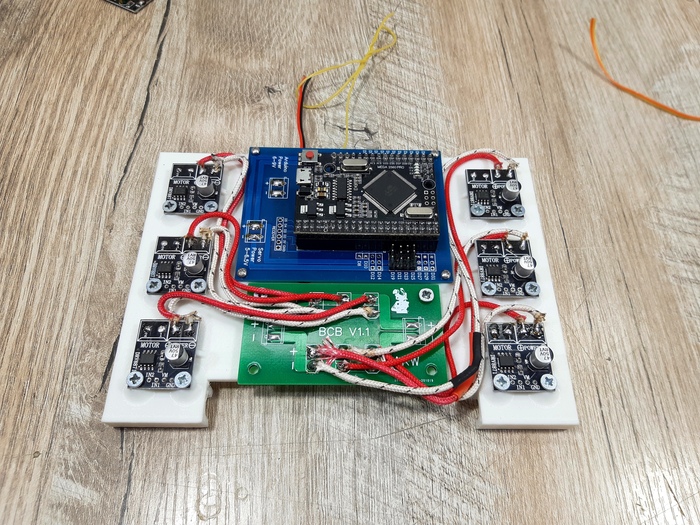
— В марсоходе используется специальная конструкция, которая включает в себя платформу с моторредукторами и колесами, а также драйвер двигателя. В корпусе марсохода установлены аккумуляторы и манипулятор для забора грунта.
— Чтобы марсоход мог выполнять свои задачи, необходимо иметь множество датчиков. Например, датчики ультразвука используются для определения расстояния до объекта. Они помогают марсоходу избегать препятствий и двигаться безопасно.
— В марсоходе есть датчики вращения колеса, которые позволяют измерять скорость и количество градусов поворота колес. Это очень важно для контроля движения марсохода и его точности.
— В корпусе ровер находятся ещё и датчики температуры, влажности и газа. Они помогают собирать данные о климатических условиях на Марсе и анализировать их.

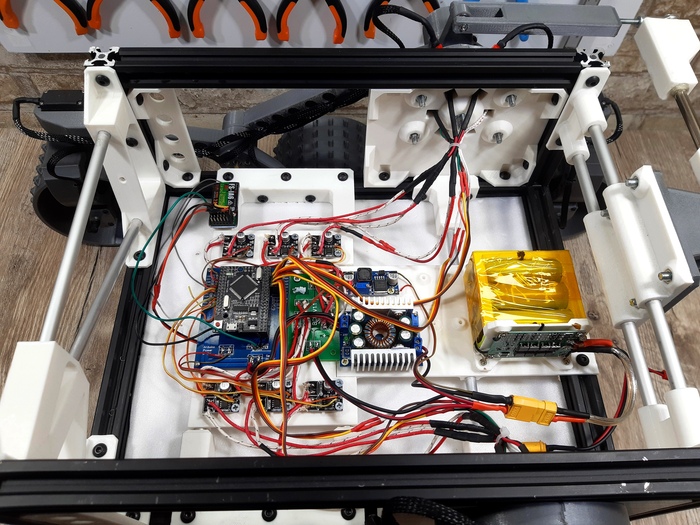
Весь марсоход управляется микрокомпьютером Raspberry Pi. Молодой изобретатель написал специальную программу на языке Python, которая позволяет управлять ровером и выполнять различные задачи. Кроме того, в роботе установлен микроконтроллер Arduino Mega, который помогает координировать работу различных компонентов и датчиков.
В результате, благодаря этой сложной конструкции и использованию различных технологий, марсоход способен выполнять сложные задачи на поверхности Марса и собирать ценные данные для научных исследований.
Продолжение исследования Марса требует инновационных подходов и использования передовых технологий. Одним из таких средств стал марсоход, оснащенный микрокомпьютером и микроконтроллером. Микрокомпьютер отвечает за машинное зрение и обработку изображений, полученных с веб-камеры, в то время как микроконтроллер отвечает за управление датчиками и моторами. Такая комбинация технологий позволяет марсоходу справляться с различными задачами и выполнять сложные маневры.
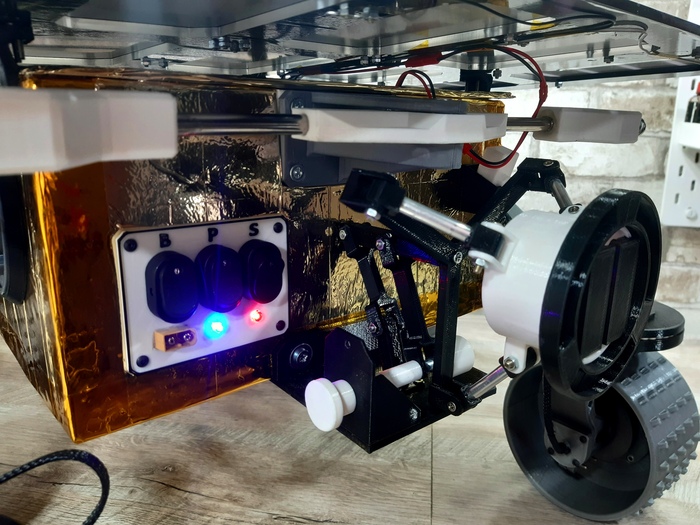
Одной из главных особенностей данной модели марсохода является наличие квадрокоптера, способного производить автономный взлет и посадку. Квадрокоптер запускается со специальной площадки на корпусе робота, что позволяет ему осуществлять разведку территории и получать дополнительную информацию о поверхности Марса.

Андрей Сырвачев, уверен, что использование робототехнических средств для изучения космоса является гораздо более перспективным подходом, чем пилотируемая космонавтика. Прогресс в исследовании Марса напрямую связан с продолжением исследования планеты автономными космическими аппаратами. Такие аппараты обладают большей мобильностью и могут достигать труднодоступных мест, что позволяет получать более полную картину о состоянии и особенностях Марса.
Создатель марсохода подчеркивает, что его проект может стать идеальной платформой для образования. На основе этой модели можно практиковать навыки программирования, мехатроники и работы с электроникой. Однако, он не останавливается на достигнутом и уже планирует ряд усовершенствований:
— Он собирается увеличить размеры робота и создать новое шасси. Это позволит ему лучше справляться с препятствиями и улучшить свои навыки в объезде препятствий.
— Создатель робота также намерен доработать его машинное зрение, чтобы он мог распознавать объекты более точно. Для более точного измерения и управления движением, он планирует установить гироскоп и датчик скорости ветра.
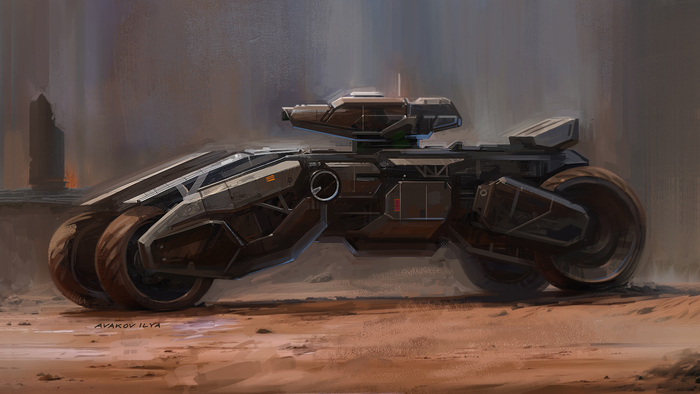
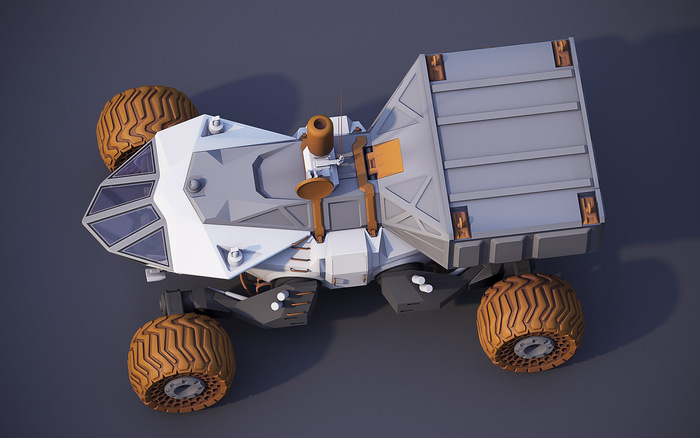
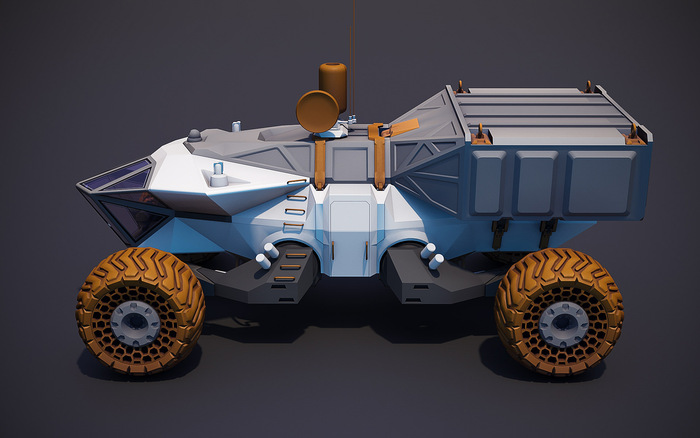
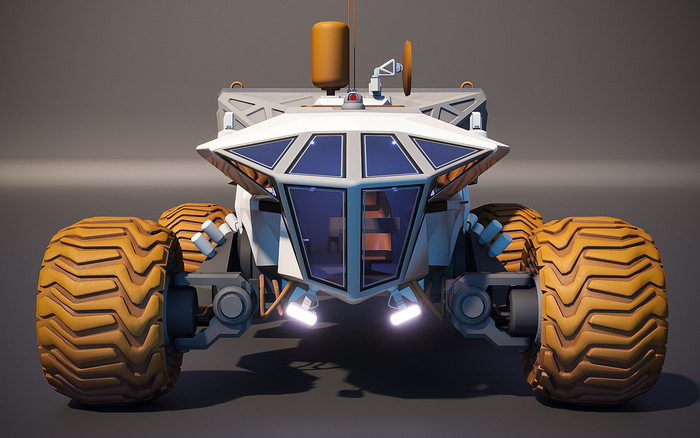
Персональный проект - концепт марсохода
Данная платформа предполагает использование с колесами либо с полетными двигателями
Сетку можно посмотреть тут -
https://www.artstation.com/artwork/xDdKlOМ

Работа в процессе - 1 этап моделинга завершен
Техника моделирования - мидполи
Модель пойдет в Unreal Engine 5, надо только определиться с пайплайном для текстурирования...
Софт: 3ds max - corona (чтобы определится с базовыми цветами)



21 ноября компания STELLS из Торонто обнародовала свои планы по разработке Mobile Power Rover, марсохода, который будет генерировать энергию от своих солнечных батарей и может передавать ее посредством беспроводной зарядки другим транспортным средствам на поверхности Луны. Его марсоход MPR-1 планируется запустить к 2025 году в качестве полезной нагрузки на посадочном модуле Intuitive Machines к южным полярным районам Луны.
Ровер будет передавать энергию с помощью беспроводной технологии, перемещаясь к транспортному средству заказчика. Другой подход заключается в том, чтобы оставить беспроводное зарядное устройство в кратере, а затем заставить марсоход выйти из кратера на солнечный свет, что позволит ему генерировать энергию и передавать ее по кабелю к этому зарядному устройству, к которому будут двигаться другие транспортные средства.
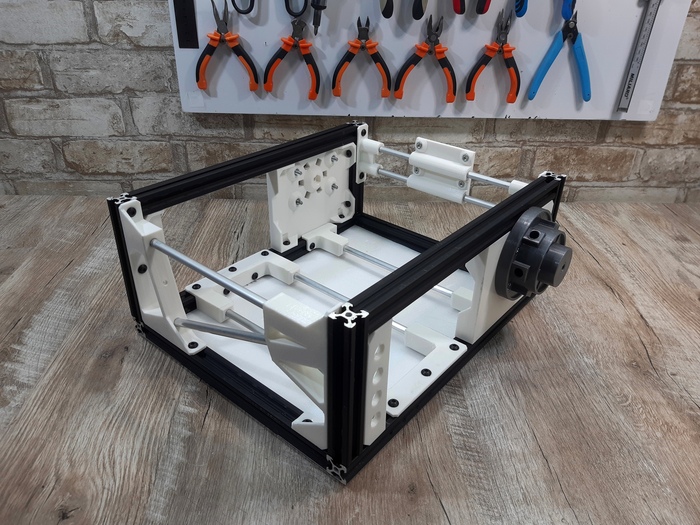
Всем привет! Сегодня у меня для вас проект первого действующего марсохода под названием Соджорнер!
Я задался целью со временем собрать радиоуправляемые модели всех существовавших и существующих планетоходов, и начать решил именно с этого. Просто потому, что это единственных из них, который я могу собрать в масштабе 1:1. По крайней мере, на данный момент =)
Ссылка на страницу проекта – тык. Тут все 3D модели, чертежи и список комплектующих со ссылками.
Видео по сборке в трёх частях:
Если ютуб уже не работает, можно посмотреть на Дзене.
Все печатные детали напечатаны PLA пластиком от Bestfilament. Заполнение для колёс стоит выставить минимальное, в районе 10%. Для декоративных деталей, вроде камер и спектрометра – по усмотрению, там много не надо. А вот для ступиц, рычагов подвески, хаба и его основания – 50–75%. Для печатных деталей корпуса (уголков) достаточно 30%.



Каркас собрал из алюминиевого конструкционного профиля сечением 20х20 миллиметров, печатных деталей, и 8 мм. алюминиевых трубок (профиля было маловато в наличии).

Для привода использовал 6 мотор-редукторов JGA25-370. Изначально проект планировался несколько иначе. Настоящий ровер был очень медленным, а я хотел сделать модель очень быстрой. Потому планировался очень лёгкий каркас, а вместо солнечной панели был бы муляж. Но когда я уже взялся за эту штуку, то понял, что это не серьёзно. В результате модель получилась раза в 3 тяжелее. Это стало проблемой, потому что к тому времени я уже купил движки на 915 оборотов в минуту. Крутящий момент у них всего в районе 200 грамм. В первых двух видео ровер гонял именно на них, но мог делать это только по относительно ровной поверхности. Потому позже пришлось их заменить на аналогичные, но менее оборотистые, на 60 об\мин – меньше оборотов, больше крутящего момента.




Управляется эта штука посредством стандартной аппаратуры управления, приёмник которой подключается к Arduino 2560 PRO по PWM. Мне пришлось самому писать программу управления этой штукой, которая сводится, по большей части, к управлению передними и задними колёсами. И я выбрал именно ШИМ, потому что в отличие от протоколов SBUS, IBUS и прочих, ШИМ поддерживается любой аппаратурой управления.
Аккумулятор собран из трёх элементов Swing 5300. Вместо них можно использовать 6 обычных 18650, собрав таким образом 3S2P аккум.

Солнечная панель собрана из 72 элементов. Каркас вырезан из оргстекла. В качестве основы для элементов я попробовал использовать печатные платы, изготовленные на заказ у JLCPCB. И что-то в этом определённо есть, так можно минимизировать весь солнечных панелей. Буду дальше работать в этом направлении. Ровер был собран зимой, так что её толком ещё не тестил, жду лета.





В общем, как то так. Проект, на мой взгляд, получился очень интересным. Следующими на очереди будут скорее всего марсоход Perseverance, проект которого уже существует, и советский Луноход-1, проект которого нужно будет создавать самому, как и этот.
Спасибо, что дочитали до конца =)
Ещё несколько фото ровера напоследок:





Марсоход Rosalind Franklin сделал еще один шаг на своем пути к Красной планете. Ровер успешно завершил процедуру высокотемпературной обработки.
Процедура проводилась в вакуумной камере предприятии Thales Alenia Space в Италии. В течение 120 часов Rosalind Franklin подвергался воздействию температуры в 35 °C. Этого достаточно, чтобы удалить скрытые загрязнения некоторых внутренних частей ровера, например, небольшие кусочки клея. Конечная цель состоит в том, чтобы предельно снизить любые признаки загрязнения земного происхождения, чтобы обеспечить чистое обнаружение органических соединений на Марсе.
Лаборатория Rosalind Franklin состоит из ряда инструментов, предназначенных для проведения химического анализа марсианского грунта. Одним из ее главных приборов является анализатор MOMA (Mars Organics Molecule Analyser). На Красной планете в миниатюрные печи инструмента будут помещаться измельченные образцы грунта, которые затем будут нагреваться, чтобы проанализировать образовавшиеся пары и газы на наличие следов органических соединений при помощи газовой хроматографии. В анализе также примут участие прибор MicrOmega и спектрометр RLS. Первый будет использовать видимый и инфракрасный спектр для определения характеристик минералов в образцах, а второй будет использовать лазер для определения минералогического состава и поиска органических пигментов.
Для получения образцов Rosalind Franklin будет использовать бур, способный добывать породы с глубины до 2 метров. На буровом инструменте также установлен миниатюрный спектрометр Ma_MISS для анализа внутренней поверхности пробуренной скважины и камера для съемки крупным планом CLUPI, которая будет рассматривать буровой шлам и образец керна, прежде чем он попадет в лабораторию ровера.
На данный момент запуск миссии ExoMars запланирован на сентябрь 2022 года. Он должен будет совершить посадку на плато Оксия (Oxia Planum), расположенное в северном полушарии Красной планеты неподалеку от экватора. Это место богато филлосиликатами — глинистыми минералами, сформировавшимися в присутствии воды, которая, как считается, некогда текла по поверхности этого региона.


Нашли для вас замечательный пример того, как заинтересовать человека инженерным делом и космическими исследованиями. И это интерактивный конструктор марсоходов под названием Rover Mechanic Simulator. Игра стоит около 1000 рублей ($13.99), и теперь доступна на консолях компании Microsoft, хотя до этого была выпущена только на ПК.

Разработчиком выступила польская студия Pyramid Games, а портировали её ребята из студии Ultimate Games S.A. Судя по всему, линейка Xbox One практически отсутствует в продаже, поэтому дешевле всего игру будет запустить на Xbox Series S за счет обратной совместимости («эску» можно взять за 27 000 рублей).

Если же у вас уже есть ПК с хотя бы GeForce GTX 960 на 4 Гб, то вы можете смело бежать в Steam и забирать игру за 289 рублей.
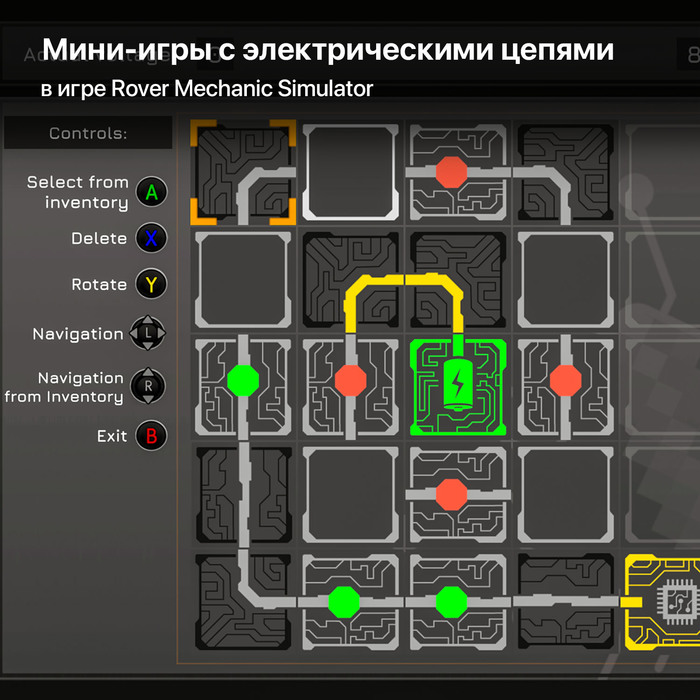
Игра весьма и весьма занимательная, хоть и довольно размеренная. Игроку предлагают «примерить роль высококвалифицированного механика первой марсианской колонии и приступить к ремонту и обслуживанию марсоходов». Вам предстоит проводить диагностику, выявлять неполадки и разрабатывать план по их устранению и, собственно, проводить ремонт. Иногда вам придется применять 3D-принтер для создания сложных деталей, необходимых в той или иной миссии марсохода. Помимо этого, игровой процесс предлагает множество завуалированных мини-игр.

В довесок, пишут, что ближайшие месяцы Rover Mechanic Simulator также появится на PS4/PS5 и Nintendo Switch. Сколько она там будет стоить, не известно.
Напоминаем вам, что сейчас на Марсе находятся 8 роверов от трёх стран планеты Земля: СССР, США и Китая. И мы про них писали. В том числе и про китайский марсоход.